Oct 12
8
MIT的可穿戴式感應包-利用反應器將感應畫面轉為數據地圖
人類在首次通過危險區域時,利用即時產生帶有註釋的數位地圖,可以將關鍵訊息傳給下一波的感應器。

機器人在有關於搜索和救援行動方面似乎有著無限的潛力—他們可以進入危險的環境,第一個反應器會快速繪製危險區域的地圖並協助建立通訊聯繫及計畫對於較大的恢復和分流工作。但在這種情形下,人類是不能到任何地方。我們仍然需要在地面上思考及呼吸。因此,麻省理工學院的團隊建立了一個可穿戴式傳感器包,他可以” roboticize”人類的第一反應,讓第一個人進入到危險環境時即時數位化地圖,就像一個機器人一樣。
其原型平台包含–加速度計,陀螺儀,相機,和激光雷達(光檢測和測距)測距儀等等的東西,固定到與塑料片的差不多大小平板計算機,在綁到使用者的胸上。這些傳感器通過無線將束數據傳到到一台筆記本電腦,讓其他人可以遠程查看用戶通過環境的進度。
適應這種傳感器平台供人類使用比看起來得可能還要複雜(畢竟,機器人已經做這種映射一段時間了)。 滾動機器人比一個移動的人更要傾向於保持他們的儀器水平,在他或她的移動,彎曲,彎身,爬升,擺振,或以其他方式協商的障礙。特別具有挑戰性的可能是激光雷達傳感器,它採用了掃描束激光(及其周圍物體的反射,)建立一個3-D數字地圖的環境。
要做到這一點,MIT的研究小組開發出一種方法,將從不同慣性傳感器的所有數據進行網格劃分的–他們甚至在一個實驗中使用氣壓計,而且發現在區別建築物的不同樓層是相當有效的—其在激光雷達掃描上是為了補償人的運動以及錯誤糾正。
其結果是平台在空中建立詳細的電子地圖,並藉由使用者的註釋完成(使用一個手持設備,繪圖者可以按下一個按鈕,指定感興趣的領域在地圖上的某些點)。研究人員計劃添加語音註釋到系統上,使用戶可以使聲音機錄相關地區的地圖,或留下警示錄音紀錄在地圖上。
http://www.youtube.com/watch?v=SY7rScDd5h8&feature=player_embedded
參考資料:http://www.popsci.com/technology/article/2012-09/mits-wearable-sensor-pack-turns-first-responders-digital-mapmakers
Oct 12
3
微型直升機模仿蜂群飛行

美國賓州大學Grasp及 KMel Robotic實驗室發明一套控制系統可以控制好幾台微小的四懸翼直升機,形成類似蜜蜂群一樣,進行一些不可思議的動作。
每一小台四懸翼直升機能夠在高速運行下,無論上下左右,皆能保持很好的穩定性及反應性能,每一台直升機之間可以有類似溝通的效果,飛行時能夠保持彼此距離,並且又能控制各自的平衡。
從飛行效果上,可以看出他們能在不相撞的情形下排列圖案,反應靈敏幾乎是一次到位,或是彈奏樂器,彈奏出具有節奏感的音樂。
http://www.youtube.com/watch?v=UQzuL60V9ng&feature=player_embedded
http://www.youtube.com/watch?v=_sUeGC-8dyk&feature=player_embedded
未來將能夠將這些智慧化的微型直升機群應用在軍事,協助警察,或是當房屋損毀時的就難協助上。
參考資料:
1. http://creationsanddesigns.plansandideas.com/?p=1582
2. http://www.digitaltrends.com/cool-tech/swarm-of-little-flying-robots-is-amazing-terrifying-video/
3. http://www.upenn.edu/spotlights/penn-quadrotors-ted
Sep 12
25
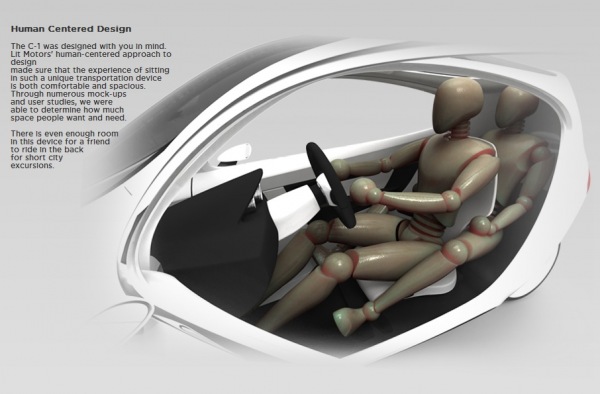
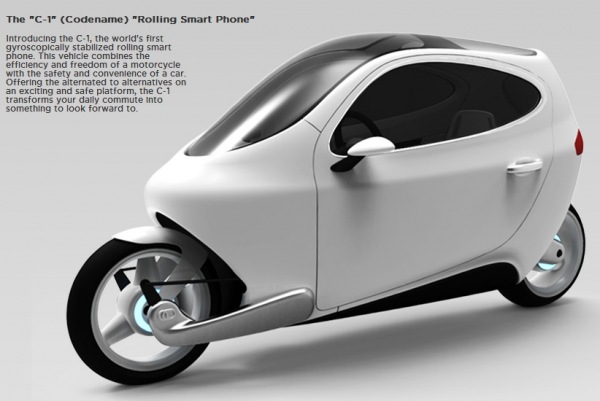
不倒翁機車-Lit Motors’ C-1
這台Lit Motors’ C-1「不倒翁機車」,除了具備「密閉式」的車身,最大的特色,在於具備名為「陀螺穩定系統」(gyroscopic stabilizing system)的自動平衡機制,只要在衝擊承受範圍內(底置的飛輪可產生超過1763 Nm的力矩),你的愛車絕不輕言倒下,此外,這還是吃電的環保機車,並且具備連線的操作系統,低階款最高時速可達120 英哩/時(193公里/時).
預計2013年稍晚進行首批生產,目標2014大量生產,初始定價24000美元,量產後降為16000美元(約48萬新台幣)。
http://youtu.be/EQ76aYX9T4U
Sep 12
19
”控制”蟑螂?!
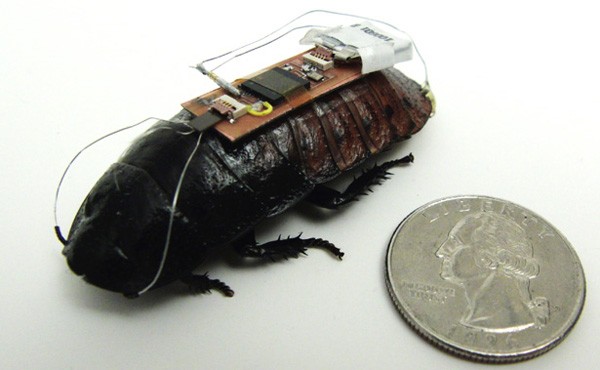 來自美國北卡羅萊納州立大學的 Alper Bozkurt 副教授及他的隊伍初步開發出一種能「控制」蟑螂爬行方向的方法。
來自美國北卡羅萊納州立大學的 Alper Bozkurt 副教授及他的隊伍初步開發出一種能「控制」蟑螂爬行方向的方法。
在一隻活生生的馬達加斯加發聲蟑螂背部裝上一個遙控微型控制器,此控制器並非控制蟑螂的腦神經訊息,反而只是
單純連接了其的觸角和尾葉(腹部的感觸器官,用作感應空氣的流動)。
在需要轉向的時候,例如左轉,操作員就會按遙控的左鍵,微型控制器就會向蟑螂的感觸器官發出有障礙物的錯覺,
如錯覺是「來自」右邊,那蟑螂就會向相反的方向走,以免撞向障礙物。
http://www.youtube.com/watch?v=gmbEX7zDzog&feature=player_embedded
此計劃的目的為開發出一低成本的災區搜索裝置,載具主要是應該於昆蟲身上;遙控微型控制器的零件(如收發訊號
的晶片)都是市面可以買到的,減省了自行開發的成本。研究員成功「指示」了這隻蟑螂走一條事前在地上畫好的曲線。
Sep 12
3
利用大腦控制無人機

利用思想控制AR.Drone
最近,Popsci對Parrot AR.Drone 2.0做一個相當穩固的審查,其為有關於娛樂用quadcopter 的 智能手機或平板電腦為基礎的控制接口所做的改進。但是,中國杭州浙江大學的研究團隊已經往前邁進更大一步。他們已經發明腦機接口,利用現有的Emotiv EEG耳機,讓使用者能夠利用他們的想法控制AR.Drone。
正如下面影片所示,此接口並非完全的精神控制,他的控制範圍也有所限制。例如:使用者想著”向右”使無人機往前飛行、”推”為上升、”向左”為逆時針旋轉、”左極轉”為起飛,而緊咬牙齒使無人機下降。無人駕駛機的機載攝影像機是利用閃爍來控制–以四次作迅速的捕捉任何進入無人駕駛飛機視頻的影像。
所以也許他並不是像iPad那樣的直觀,利用傾斜的方式就可以造你所想要的方向飛。但對於殘疾人士而言,利用大腦訊號來控制這樣平台的能力將是相當巨大的。他不只使人可以透過無人駕駛飛機及他的攝影像機的擴展移動性的一種形式,更為其它可以擴展出更多的流動性但目前缺乏的腦機接口打下了基礎。此外,這並沒有任何昂貴的實驗設備–他只需要市售的EED設備,一台筆電以及AR.Drone,這些之中沒有任何一樣會昂貴到會破產的。
http://www.youtube.com/watch?feature=player_embedded&v=JH96O5niEnI
參考資料:
http://www.popsci.com/technology/article/2012-08/video-controlling-drone-nothing-thoughts
Aug 12
25
PAL-V one
受夠了總是在路上不斷塞車嗎?
現在有一種最新型態的汽車,它結合了直升機與汽車的功能!這款荷蘭飛行汽車PAL-V ONE有兩個座位,
在路上行駛時是使用三個輪子,最高時速可達180公里。特殊的車身邊緣傾斜和輪胎的精細設計,
讓它在路上跑起來就像機車一樣靈活!若是駕駛它飛行,時速也是180公里,高度則可達海拔1.21公里以下。
當然,若要駕駛這台車,仍需要先考到專業的飛行執照等等相關執照才行喔!
PAL-V 飛行汽車既是一架飛機,也是一輛汽車:為私人、專業人士和組織提供了快速的門到門機動性。
它目前使用普通汽車的汽油,將來還會采用生物柴油或生物乙醇。陸空行速最高均可達到每小時180公里。
在陸地上,這款采用空氣動力學設計的3輪汽車同時具備汽車的舒適性與摩托車的靈活性,這要歸功于其已獲專利的尖端“傾擺”系統。
飛行時,PAL-V 就成了一架標准的旋翼機。低速起飛和降落,不會失速,極易操控。這也使 PAL-V 成為安全性最高的飛機類型之一。
只需要20-30小時的培訓就可以領取牌照。起飛時只需要一條長165米的跑道,可以是鋪設過的或草地跑道。
多位專業人士和公司正在對 PAL-V 能夠為其業務帶來怎樣的效率和更高的效益進行研究。
警察、軍隊和飛行醫生等潛在的主要客戶已經表示對這款飛行汽車在偵查、機動性、戰后局勢援助和國土安全方面的用途有興趣。它將機動性提高到前所未有的高度。
不知道是因為交通擁擠已是全球各先進國家的共同問題,還是飛行始終是人類最大的夢想,在今日的新聞報導中,竟然同時出現有兩則同樣是以〝空中飛車〞為主題的報導,一則是介紹美國麻州的TERRAFUGIA Transition空陸兩用車,另一款則是來自荷蘭的PAL-V One。
與TERRAFUGIA Transition空陸兩用車採用折疊固定翼概念不同的是,
PAL-V公司所設計的PAL-V ONE卻是採用折疊螺旋翼的方式來達到飛行的目的,
在一般的行駛模式下,螺旋翼可以向後收折於車頂的後方,
並且以三個輪子在地面上行走,類似直昇機座艙的車身也擁有足以兩人一同乘坐的空間配置,
車身尺碼則分別為4.0×1.6×1.6m。
有趣的是,PAL-V公司還進一步公布了PAL-V ONE的技術規格,
並且分屬道路與飛行兩種性能表現,其中PAL-V ONE擁有依據230hp的引擎,
在道路上可享有180km/h的極速表現,同由於車身重量僅有680kg,
因此0-100km/h衝刺加速還能在不到8秒的時間內完成,
並可享有12km/L的平均油耗及糕達1200km的行駛距離。
而在飛行模式時,PAL-V ONE雖然是採取直昇機的架構,
但還是需要165m的跑道來進行起飛的動作,
著陸時也需要30m距離來進行減速的緩衝,
而最高飛行時速也是180km/h,但由於飛行時較為耗損燃料,
所以〝行駛距離〞也將因此而縮短至350-500km的水準。
目前PAL-V公司仍在積極尋找其他的投資者與資金,
從2001年開始投入相關領域的研發至今,已經相繼砸下了高達600萬歐元(約2.3億台幣),
預計在2014年便有可能量產上市,實現人類愛好飛行的的夢想。
照片:






影片:
http://www.youtube.com/watch?v=SgHSaNtAMjs
參考資料:
http://tw.myblog.yahoo.com/jw!EbZOgL6aExsLaJp0wNih/article?mid=15805&prev=15806&next=15774
http://oursogo.com/thread-1347112-1-1.html
http://pal-v.com/the-pal-v-one/
http://www.juksy.com/index.php/super-car/item/15995-%E7%B5%82%E7%B5%90%E5%A1%9E%E8%BB%8A%E6%83%A1%E5%A4%A2-pal-v-one%E5%80%8B%E4%BA%BA%E9%A3%9B%E8%A1%8C%E6%B1%BD%E8%BB%8A
Aug 12
21
靈活的機器…牛?!

Boston Dynamics 的 BigDog 是 DARPA 出資的計畫中相當瘋狂的一個,意圖打造一隻不受地形限制,可以和部隊一同移動,替大兵背重物和補給的機器人(狗?)。目前看起來 BigDog 還沒有正式加入美國陸軍,不過 Boston Dynamics 已經在開發下一代了 — 這隻名為 Alpha Dog 的機器人比前一代大了一大圈,與其說是狗,不如說是隻牛。Alpha Dog 有大約 32 公里的航程,目前為止只有在室內做模擬測試。
影片:
http://www.youtube.com/watch?v=SSbZrQp-HOk&feature=player_embedded
一個可以在粗略地形中行走,奔跑,攀爬和攜帶重物的機器人。BigGog具有運動控制器能控制腿步運動以及處理各種傳感器。控制系統用以保持平衡及導航作用,適應各種不同環境。運動傳感器包括接觸地面負荷,陀螺儀,立體視覺系統,監測油壓,油溫。
BigDog可爬上35度的斜坡,跨越瓦礫,爬上泥濘登山步道,走在雪地及水中,並可攜帶340磅的負荷。最終目標是開發一個機器人,可以到達任何人與動物可以去的地方。
影片:
http://www.youtube.com/watch?list=UU7vVhkEfw4nOGp8TyDk7RcQ&v=cNZPRsrwumQ&feature=player_detailpage
參考資料:
http://chinese.engadget.com/2011/10/03/boston-dynamics-alpha-dog-makes-alyx-vances-pet-look-like-a-toy/
http://www.bostondynamics.com/robot_bigdog.html
Aug 12
9
自動接殺垃圾桶
http://www.youtube.com/watch?v=NqDTE6dHpJw&feature=player_embedded
日本一位匿稱Modder FRP的網友他突發奇想將Xbox Kinect技術與垃圾桶結合,設計出「自動扔進垃圾桶」。
與一般垃圾桶不同處在於,他把XBOX 360遊戲機的Kinect體感套件技術改裝在垃圾桶身上,並在底部裝上電動輪子,搭配自己撰寫之偵測與預測程式,組合成「自動扔進垃圾桶」,自動偵測有無垃圾要從天空中落下,如有感應到垃圾要落下,它將快速移動到垃圾將落下的位置不偏不倚的把垃圾接住。
附註:Kinect 技術簡介
(來源:http://www.techbang.com.tw/posts/2936-get-to-know-how-it-works-kinect)
1.Kinect中間鏡頭是攝影機:
一般常見的RGB彩色攝影機,辨識玩家身分以及辨識基本的臉部表情,也可應用於擴增實境遊戲、
以及視訊通話時;同時Kinect還搭配了追焦技術,底座馬達會隨著對焦物體移動跟著轉動。
2.左右兩顆鏡頭則是3D深度感應器:
左右兩邊鏡頭則分別為紅外線發射器和紅外線CMOS攝影機所構成的3D深度感應器;Kinect主要就
是靠3D深度感應器偵測玩家的動作。
3.此外還有陣列式麥克風:
藉由多組麥克風同時收音,比對後消除掉雜音。

Jul 12
31
自動駕駛上路測試!!
http://www.youtube.com/watch?feature=player_embedded&v=dO6JtncrY08
三輛自用車和一輛卡車成功的在自動駕駛模式下於高速公路行駛了125哩,透過雷達和雷射追蹤第一台駕駛者所駕駛的卡車,並和其保持適當的距離,但駕駛者如果不放心的話還是可以馬上自己駕駛!Volvo和Ricardo為了想測式自動駕駛在實際上路時的效果而選擇了高速公路進行測試,前導卡車以時速53哩的速度行駛,不管是加速、煞車或是轉彎都會跟著第一台車,這也是第一次自動駕駛上路測試!!
Jun 12
26
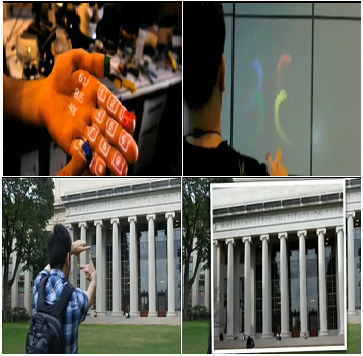
第六感科技
麻省理工學院的天才學生普拉納夫(Prarnav Mistry)展示了一種叫做「第六感」的人機互動新裝置。這套裝置包括:手指上的各色輔助空間定位指套、肚子上的投影機跟攝影機,三種東西連在一起之後才能作用。無論是投影、攝影、解碼捕捉、虛擬碰觸,任一項技術都沒有獨特之處,但把它們組成一串可能是第一人。如果?,Windows系?的圖形化介面把人們從Dos系?下解放出?,用更符合直覺和人性的方法讓人們對電腦進行操作是一次新技術的跨越的?,那麼這套普拉納夫(Prarnav Mistry)提供的第六感(Sixth Sense)?置,則是另外一次意義更為深遠的騰躍。

截至目前為止,對於人機介面的研究所在多有,像是最近因為任天堂遊戲機Wii的流行,鼓勵了不少學院內的研究生進行「無線感應手把」以及類似Wii遊戲機的操作介面的專題跟研究。Wii的把手雖然方便,但仍需要手持一個機械,所以後來便有人想到,也許我們可以單純的用攝影機補捉特定的物體,再輔以電腦運算,這樣就可以達到一樣的效果了!而普拉納夫更進一步的將投影機整合到他所設計的系統裡,合拼攝影機補捉使用者的動作!這就是影片中虛擬手機鍵盤的原理。
影片 :
http://www.youtube.com/watch?v=qC3H3JOtvSs&feature=player_embedded
參考資料: http://case.ntu.edu.tw/blog/?p=1558