Dec 13
16
機械手臂挑戰電流急急棒

ABB Robotics 開發許多高精度機械手臂,用於許多生產線上,此影片中展示三個機械手臂,擁有三個自由度,兩個盤子上放了影料罐,當盤子角度不同時,機械手臂上的棒子必須在罐子的縫隙中移動,使用者可以自行調控移動速度,每個手臂間的速度皆為獨立控制,當速度越快時,多自由度的機械手臂必須有很好的響應速度才能避免接觸。高精度伺服系統的開發可以加快生產流程,以及增加機械加工製程的速度與精度。
參考資料:
http://www.engadget.com/2009/10/20/robots-from-abb-perform-amazing-feats-of-coordination-prove-bet/
Dec 13
10
飛行球形機器人GIMBALL-即使在物體碰撞下仍能持續飛行

當感測器和微芯片變得越小,越便宜且功能越強大,這使人更容易用他們來做任何事情。但,有時越簡單越好。
沒有立體攝像機,雷達和複雜的算法,洛桑聯邦理工學院的團隊為他們最新飛行機器人–GimBall,配備了導盲手杖,以幫助它瀏覽嚴峻,雜亂的空間。
帶著光球形籠子的GimBall,其籠子在碰撞時旋轉而內部機器人保持穩定。GimBall的籠子使得它可以防止絕大部分的狀及,甚至因此通知其飛行模式。該機器人喚起如昆蟲多次飛入一個窗口,直到它找到開放的空間和自由。
為了測試GimBall,團隊將其放置於森林,對於一個傳統機器人而言,穿越森林的程式設計將會是一個棘手的問題,人任何樹木發生的任何碰撞都由可能意味著實驗的結束。反觀GimBall是隨他喜愛的自由地碰撞盡可能多的物體,並且,每一個碰撞,可以使其重新調整系統。
GimBall的發明者說“這個平台讓我們了解到,只要經得起碰撞自,主導航要簡單得多:這不需要先進的傳感器,而且障礙,甚至可以用於指導機器人。
並非編輯複雜飛行模式或一系列自主的相互作用,Gimball可以採取直線路徑的指示穿過森林。像一隻昆蟲,它撞上東西,然後單純回到他原本的飛行路徑。
就如同其他飛行機器人,GimBall可能會應用於在凌亂環境的搜索和救援任務。不像其他的飛行機器人,GimBall不會在做過多監查工作,它並完全不融入周圍環境。
參考資料:http://singularityhub.com/2013/11/02/flying-spherical-robot-gimball-collides-with-objects-but-keeps-on-flying/
Nov 13
29
舌控輪椅
喬治亞理工的研究團隊近日發表了一項研究成果,在不久將來應該可以嘉惠甚多因疾或其他因素全身癱瘓的朋友。
一如上圖所示,他們自 2005 開始就在構思一個讓病友最容易操控輪椅的方法,而最終是採用了舌頭來進行控制,其可達到的操控精確性,經比較後不僅可以跟吹-吸操作系統(sip-and-puff)媲美,速度更是快三倍;技術上來說,是在舌尖上安放磁性小裝置,然後讓兩邊掛在頭盔上的感測器偵測舌頭動作,隨後透過電腦分析資料來操作輪椅;實驗中則是以 iPod (其他行動裝置應該也可以) 來作為運算核心,也讓這技術的推廣可以稍微容易一點。
不過目前仍有一些非技術性的問題待克服,包括如何說服保險公司願意補貼,還有醫療有關單位是否核准等;而計畫主持人 Maysam Ghovanloo 為了讓這項裝置離開大學實驗室、往外普及化,還另外成立了 Bionic Sciences 這家公司,他預計最快 2015 年應該就可以上市,如果上述的問題最終不成問題的話。
參考資料:http://www.cool3c.com/article/73301
Nov 13
25
Handie 義肢
https://www.youtube.com/watch?v=02y8ZYduRvA

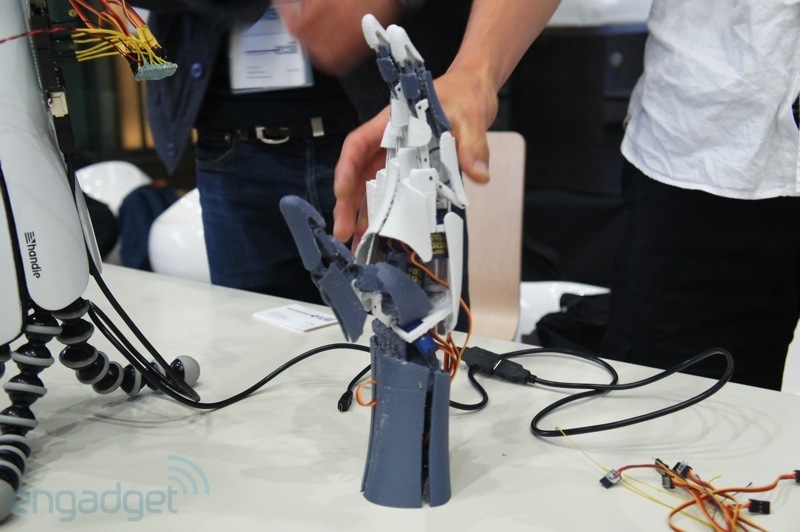
Handie 義肢的製作成本壓低到了 US$400(約 NT$11,800 / HK$3,100)以下 ,以智慧型手機取代了昂貴的專用肌肉感應模組,用來感測身障人士健在肌肉對於動作所傳遞的訊號;另一個降低成本的關鍵則是 3D 列印,使用者將可以用更低成本打造義肢零件,進行制作或修復,而這樣也等於延長了產品壽命。藉由此技術亦能更輕易地達成客製化的工作,畢竟每位身障人士的狀況也許都略有不同,可以直接改版部分零件,而非以往需要再花費一次購買新產品的費用。
設計方面,開發團隊在這次的版本中新增了提升手指靈活度的特製機構,讓每隻手指分別僅需使用一個馬達即可靈活驅動三節關節。 從基本適應物品形狀的握持、物件在不同位置的適應甚至是僅使用少數手指的握持狀況都可以順利對應。
此計劃接下來的目標是希望能透過更縮小感測電路的尺寸,甚至改以全面無線化來增進便攜性。所以,誰說 3D 列印只是噱頭呢?
參考資料:
1.http://www.engadget.com/2013/11/03/handie-prosthetic-cheaper-smartphone-3d-printing/
2.http://chinese.engadget.com/2013/11/04/handie-prosthetic-cheaper-smartphone-3d-printing/
Nov 13
11
高精度伺服系統

由Mitsubishi Electric所研發出來的AC 伺服系統,使三個齒輪的控制在4500rpm的同步轉速, 馬達控制在微米等級,因此可以在高轉速下,齒輪間亦不會發生干涉現象。
此系統包含三部分,第一個為底層的線性馬達,控制直線運動,使齒輪間接觸,第二個為直驅馬達,使最上層的馬達與齒輪能進行水平方向的旋轉,最後一個部分為帶動齒輪轉動的馬達,在影片中的轉速為4500rpm,而最高轉速可以到達6000rpm,皆可使三個獨立的系統達到齒輪準確契合的效果。
此高精度的馬達伺服系統可應用於許多場合,例如智慧型手機的零件組裝,當產品的組裝物件變小時,即需要此類型的伺服系統,促進高精度的產業發展。同時,此高精度系統亦可應用至醫療的用途。
參考資料:
1.http://www.diginfo.tv/v/13-0075-r-en.php
2.http://www.geek.com/science/perfectly-synced-gears-rotate-at-4500-rpm-and-mesh-without-slowing-1573221/
Nov 13
4
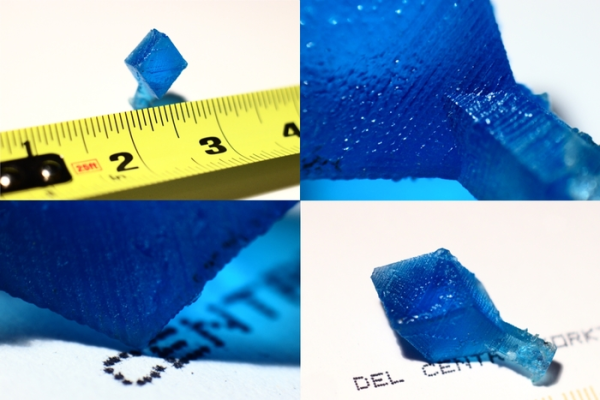
Peachy Printer
加拿大的Rylan Grayson發明了Peachy Printer——全球首款100美元的3D打印機。Peachy Printer並沒有像其他3D打印機那樣通過降低組件成本來降低售價,而是通過改進3D打印機的設計原理來實現低價。
Peachy Printer是一台光刻打印機,通過控制光束將光敏樹脂凝固成形。Peachy Printer會沿著X軸和Y軸移動激光光束來生成物件的形狀,另外通過滴灌系統來控制樹脂Z軸的高度,也即物件的高度。
3D打印機工作原理
Grayson編寫了一款基於Blender的插件,通過該插件能將3D模型轉換成音頻信號。通過電腦上的耳機插口就可以向打印機傳輸相應的音頻信號。該音頻信號會驅動一對電磁鏡,通過這對電磁鏡可以控制激光光束的傳播路徑。音量越大,鏡子的移動就越大。基於這個原理,激光光束就可以刻畫出物件在XY平面內的形狀了。此外,智能機、收音機、MP3播放器等都可以用來控制打印機。
滴灌系統:在打印機的頂部有個容器,其中充滿了鹽水,這些鹽水會隨著彎管不斷下滴。通過一個閥可以控制鹽水的下滴速度。每次下滴都會通過2個電極,此時麥克插孔會接受一個因此產生的電信號。隨著鹽水的不斷滴灌,光敏樹脂會不斷上浮。軟件也會不斷監聽麥克風位準,並記錄下滴的次數,同時計算是否已經完成。通過這些,軟件可以控制樹脂所處的Z軸位置。最終完成整個打印工作。
Oct 13
21
M-blocks 自組裝機器人概念
這是由MIT的CSAIL( Computer Science and Artificial Intelligence Laboratory)所提出的自組裝機器人概念,想法為透過方塊作連接,這些方塊並沒有可以行動的外接元件,但他們仍然擁有可以移動的能力,不論是在地面滾動、跳躍至空中或者是爬行至另一方塊上都可以。這是因為在每個方塊中擁有一個轉速可達到20000rpm的飛輪,它藉由這個飛輪的轉動慣量改變,產生方塊的轉動、移動。為了使方塊之間能達到相互連接的功用,在方塊的每個面向上都有永久磁鐵存在。
現階段驅動方塊的方式是透過無線電傳遞訊息給方塊,之後將利用演算法讓方塊可以自行判斷組裝方式及規則。未來是希望能將方塊更小型化,如此可以做出類似液態般的隨意改變其形狀和功能、應用方面相當地廣。現階段所想到的應用是可迅速堆疊出不同的家具、某些重型的組裝物、軍事用途上修補毀壞的建築或是利用在修補沖斷的橋樑中,可以透過方式馬上連接出一座新的橋。
參考網址
http://web.mit.edu/newsoffice/2013/simple-scheme-for-self-assembling-robots-1004.html
Oct 13
15
機器人走鋼索

機器人可用於取代人力,進行較危險的工作。以電纜為例,可藉由機器人的協助,檢查電纜的安全性以及損壞評估,並且減少人力成本。同時可做為吊橋的安全檢查。
一位美國的機械工程研究生Nick Morozovsky,研發一個名叫” SkySweeper”的機器人,比起傳統檢查電纜用途之機器人成本少了許多。” SkySweeper”的移動方式也非常特別,類似尺蠖的爬行方式,可在欲移動之繩索上,藉由一伸一縮的姿態前進,中間有馬達控制其移動量及方向。” SkySweeper”目前屬於一個簡單的樣本,但實際應用的場合可以變得更多樣化,可在抓取之桿件上任意放置所需的感測器。此設計除了達到多樣化的應用之外,設計成本亦減少許多。
參考資料:
1. http://www.geek.com/science/skysweeper-bot-will-check-powerlines-so-people-dont-have-to-1553172/
2. http://www.youtube.com/watch?feature=player_embedded&v=2h6UPMcy8-o
Oct 13
7
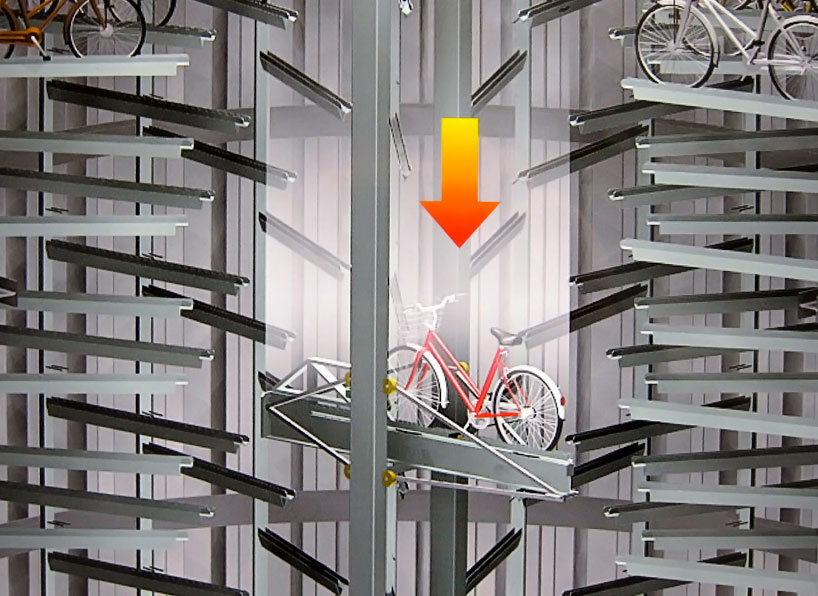
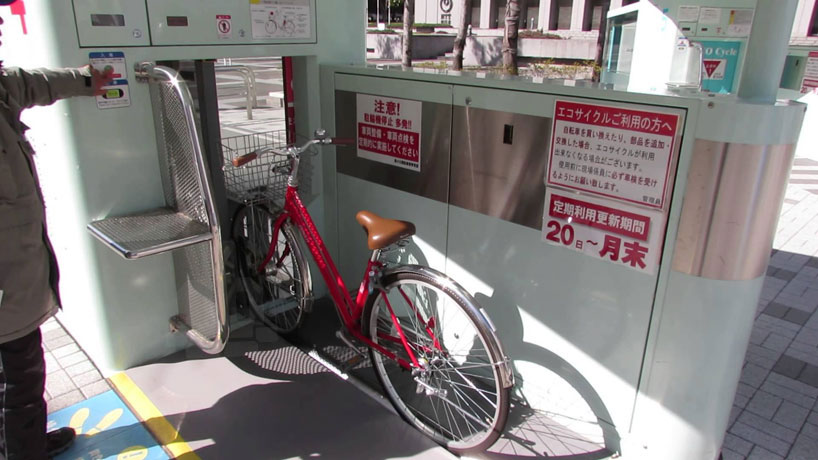
日本自行車地下停車場,保護愛車、改善市容
日本政府提倡環保節能,推廣自行車更是不遺餘力。他們已成功讓人人將自行車當作日常生活的交通工具,東京更是公認的自行車友善城市。但此熱潮伴隨著自行車大量出現,市區已經沒有足夠空間建置停車場,常常可以看見自行車擠成一團隨意停放。
為了解決這個問題,建設公司在東京鬧區挖了 11.65 公尺深、直徑 8.15 公尺的地下停車場 Eco Cycle,一共可容納 204 輛腳踏車。停車場的操作十分簡單,首先用戶必須申請會員 IC 卡,將附帶的 IC 辨識標籤貼在車子前輪。接著將腳踏車固定在一樓的停放處,機器會自動運轉將它送進地下,分配至 204 個儲存處。要將車子取回也容易,只需感應票卡,車子就會在 8 秒內回到地面上。
這個停車場採包月 1800 日圓計費,不僅讓市容變得整齊,也減低自行車被風吹雨打或是竊取的風險。
台灣目前正在推廣騎乘腳踏車,或許企業該看準商機推出類似服務,順便整合台北市 Ubike 政策,不僅保護這些公用腳踏車,還能停放更多車輛,避免大家下班後總是面對無車可騎的窘境。


Sep 13
23
重力燈-無電源地區的光源
設計師 Martin Riddiford 與 Jim Reeves 耗費了四年的努力,打造出了一款僅需 5 美元的低成本 LED 燈具,重要的是,他可以透過隨時在我們身邊的「地心引力」來發電,用以驅動照明、收音機或是幫電池充電。
使用者只需將他們所精心設計的重力燈(Gravity light)– 吊燈,吊掛是驅動他的最主要方式,只要將沙包裝入了適當重量的一般石頭吊掛其上,便能利用它內部的驅動元件連續提供約半小時的發電時間 — 原理類似今年 CEATEC 上所見到的微震發電技術類似
參考資料:http://chinese.engadget.com/2012/12/29/gravitylight-uses-weight-to-illuminate-without-batteries-or-fuel