Nov 14
11
Multi Jet Fusion 3D
目前市面上看到的 3D 印表機雖標榜具多種材質的列印能力,不過實際上一次仍只能進行單一材質的印刷,所以若想透過 3D 列印做出多種材質的物品就需要透過多次的列印程序做出零件並且組裝,不過這又牽涉到如果想製造的東西較複雜還有卡榫與機構設計問題,導致目前 3D 列印多半是用於生產單一材料的物體;然而 HP 展出的 Multi Jet Fusion 3D 印表機概念機將要改變這個現況。
HP 的 Multi Jet Fusion 是一款較大型的 3D 印表機,大概跟洗衣機尺寸差不多,它最大的特色就是可以同時進行多種材料的 3D 列印,而這樣的功能將會把 3D 列印帶到更高的境界;舉例來說,原本想要透過 3D 列印生產一把電動牙刷,透過多種材料的混合列印,可實現在塑膠製的本體覆上一層橡膠蒙皮,並同時在刷柄內埋入導電物質,這是現在 3D 列印所辦不到的。
參考資料:http://www.cool3c.com/article/86548
Nov 14
4
無動力步行支援機ACSIVE
「ACSIVE」是在niconico超會議3中所展出的無需使用電力的步行輔助支援裝置。擔任其研究開發的名古屋工業大學教授佐野名人表示將在今年秋天開始販售。首要用於中風患者的步行支援,在醫療方面外,也將可能活用於登山類的休閒用途上。但一組約15萬(日幣)的價格,若要用在休閒上似乎需要相當的勇氣,目前有考慮配合同業以出租的方式提供給使用者。
ACSIVE是一種不需要馬達與電池的步行輔助工具,在展示區中有位穿著ACSIVE的女性輕盈地在跳著舞。腰部以腰帶固定,腰部與小腿之間、大腿到膝蓋的部分使用的是抗扭曲性的金屬部件。
根據腰部側面下的彈簧與重力,協助其自然平順的步行,不需動力支援,也沒有充電的必要。專門研究受動步行理論的佐野教授,身為受動步行機器人的研究者,同時也是「無動力可持續下坡機器人」的開發者。這種利用單擺原理的機器人,達成了連續13小時45分鐘的受動步行,相當於約10萬步、15公里的距離,達成了金氏世界紀錄。
ACSIVE受動步行機器人的動作與人類的步行特徵相當接近,作為步行能力弱化者的支援機器,不停地以實用化為目的發展中。不過,步行機器人在下坡時似乎會一直帶著下半身往下前進,可能會造成非常恐怖的後果。
資料來源:
http://japanese.engadget.com/2014/04/26/imasen-acsive-15/
這項發明改善了傳統自動門的兩大問題:
1. 只有當使用者從垂直方向走進門才會開啟。
2. 會偵測使用者接近的速度與距離,調整開門的速度與時間。
門上裝有三維雷射掃描感測器,用來判斷使用者的位置與行為並進行預測,一扇門大約會增加1000美元的價格,但是之後的邊際效益則不只1000美元。
From the University of Electro-Communications, and Hokuyo Automatic Co., was presented last week at ICRA 2014 in Hong Kong.
參考資料:
http://spectrum.ieee.org/automaton/robotics/industrial-robots/automatic-sliding-doors-get-star-trek-intelligence
Oct 14
16
乒乓球機器人
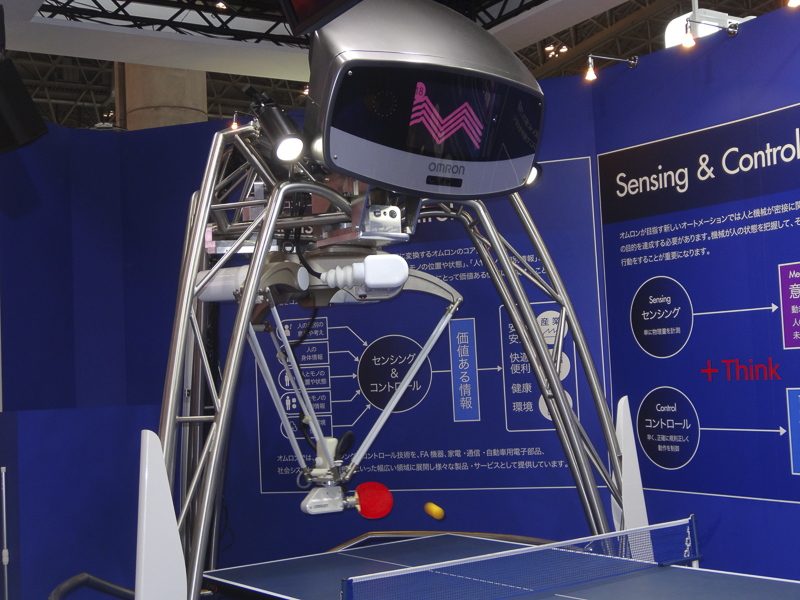

日本OMRON公司在日本電子高新科技博覽會CEATEC JAPAN 2014展出一台乒乓球機器人來顯示一下他們的自動化設備的實力,利用感應器來追蹤乒乓球以及對手位置,並精準的將球打回至對面桌子上。但是他有個缺點,就是”手”不夠長,所以偏短的球會無法擊回。
雖然 OMRON 仍未有計劃把這機器推出市面,但我們可以想像只要把它改裝一下就能夠擔任其他工作。據褔布斯的 Michael Kanellos 所說,這機器能夠勝任複雜的拾放工序(pick and place)並且可以迅速適應不同的生產線。
參考資料:
1.http://mono-tech.com/news/3344/
2.http://chinese.engadget.com/2014/10/08/omron-ping-pong-robot-ceatec/
Oct 14
6
不需要電池的 ABZO編碼器
Oriental Motor公司所開發的驅動器,特點是可以不用透過電池的紀錄位置資訊,即使在斷電狀況下也可以保有原有的位置資訊,能迅速回復產線。
原理:
類比時鐘是透過觀察秒針、長針、短針的位置來掌握現在是幾點。ABZO編碼器配備相當於時針的4個齒輪。
這4個齒輪的位置可利用sensor(眼)檢知,辨識位置資訊。
以原點為基準,可以檢知馬達軸1800圈的絕對位置。
因為沒有電池所以可以達到配電盤最小化
參考資料:https://www.orientalmotor.com.tw/om/topics_AZ_140829/feature.html
Sep 14
29
啦啦隊機器人
啦啦隊機器人是日本「村田製作所啦啦隊」所發明,是一種坐在球上的機器人。裙子內藏有三個全向輪,利用它們進行各方向的移動。控制平衡部分,則是使用倒單擺技術,在機器人內放置一顆陀螺儀感測器,進行機器人姿勢的檢查,向傾倒的方向移動以避免跌倒。機器人身長36cm(含球體),重約1.5kg(不含球體),球體使用中空之不鏽鋼材質,表面有防滑塗層以避免打滑。它能夠一邊保持平衡,一邊向任意方位作速度達30cm/s的前進運動。另外肩膀與頭部共有四個自由度,但與此次的表演無關。
啦啦隊機器人最大的特徵在於,它能夠操縱多個機器人同時運行,各機器人可依據舞台上方所設置的發信機發出的超音波與紅外線,計算自己的位置。利用無線方式將資訊傳到外部伺服器,就可以透過群控技術下達動作指示,同時讓10個機器人一起跳舞。
啦啦隊機器人是以「為世界上的創作者加油!」為開發觀念所設計出來。社長小島祐一說「這個機器人集結了本公司的挑戰精神與技術,想要去感受電子技術的可能性與光彩」
資料來源:http://news.mynavi.jp/news/2014/09/26/330/
Sep 14
23
反抖動湯匙
先前《科技新報》報導,位於舊金山的 Lift Labs 推出 Liftware「反抖」湯匙,採取「主動抵消」技術,解決巴金森氏症病人手顫抖個不停的問題,這個造福病人的先進湯匙,如今獲得 Google 的垂青,Google 將買下 Lift Labs,購併後 Lift Labs 將加入 Google X 的生命科學團隊共同運作。
所謂主動抵消,就是當手抖動的時候,湯匙會往反向抖動,抵消手抖造成的位移,讓湯匙頭保持在同一個位置上, Liftware 湯匙內建的感測器與軟體,會判斷動作的大小,主動抵消小而細微的抖動,但不影響大而平順的動作,因此可以平順移動湯匙。
2(Source: Lift Labs)
過去巴金森氏症病人常因手顫抖而難以進食,Liftware「反抖」湯匙可說是他們的一大福音,而這也是 Google 收購的可能原因之一,因為 Google 創辦人之一,謝爾蓋‧布林(Sergey Brin),他的母親就是巴金森氏症患者,而由於巴金森氏症是一種遺傳性疾病,因此布林本人也很可能以後會病發,收購 Lift Labs ,多少有個人的因素在內。
Lift Labs 表示,在 Google 的協助下,將能進一步擴大其研發範圍,而 Liftware「反抖」湯匙推出時售價偏高,若在 Google 的資金挹注下,可望透過量產降低成本與售價,造福更多有需要的病人。
參考資料:http://technews.tw/2014/09/14/httpwww-cnet-comnewsgoogle-buys-lift-labs-maker-of-spoon-for-parkinsons-tremors/
Aug 14
20
輔助機械手臂

MIT機械研究生Faye Wu提出一種輔助型手臂,可以讓使用者在單手的情況下完成複雜的手部動作。但是目前這種只是研發雛形,並沒有增加打字方面的功能,而是著重在抓取方面的能力。該設計主要藉由感測器的輸入以及伺服控制,可以判斷使用者的意圖來進行穩定操作。
目前的設計上缺乏觸覺與力量反饋的感測能力,然而這些卻是手指有效運作上的關鍵。此外在外型上也略過龐大,Faye Wu表示在日後設計可能會使手臂可以彈進收納如手錶大小的配件之中,並且於使用時再度彈出。在感測器部分也可以針對需求增加感測器,或者針對用途對手臂夠再來修正。
參考資料:
http://spectrum.ieee.org/automaton/robotics/humanoids/heres-that-extra-pair-of-robot-fingers-youve-always-wanted
Aug 14
17
Self-Assemble Kilobots
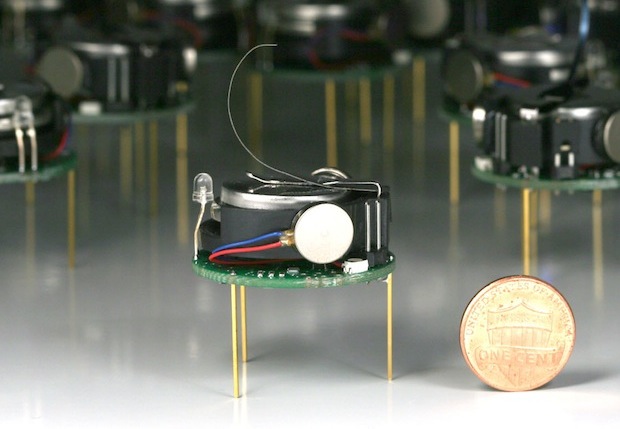
美國哈佛大學團隊研發出可以自行溝通的組合型變形金剛「kilobots」,機器人約高五公分、直徑三公分,用三個金屬小腳移動,以紅外線互相溝通,讓每個機器人知道團體的邊界、追蹤其離起始點的距離,及如何感觸相對位置。集體運作的機器人能較好地處理未知環境,比如可變成蛇的形狀通過沙丘,或是變成球滾下丘陵。組合型機器人非常有利於在未知環境進行工作,如深海探險、火星任務、油污外洩清潔任務與軍事偵察等。
參考資料:
1. http://spectrum.ieee.org/automaton/robotics/robotics-hardware/a-thousand-kilobots-self-assemble
2. https://tw.news.yahoo.com/1024%E5%80%8B%E5%B0%8F%E6%A9%9F%E5%99%A8%E4%BA%BA%E9%9B%86%E9%AB%94%E9%81%8B%E4%BD%9C-%E6%96%B0%E8%AE%8A%E5%BD%A2%E9%87%91%E5%89%9B-%E5%8F%AF%E8%87%AA%E8%A1%8C%E6%BA%9D%E9%80%9A%E5%90%88%E9%AB%94-221040682.html
Aug 14
13
跑跑迅猛龍
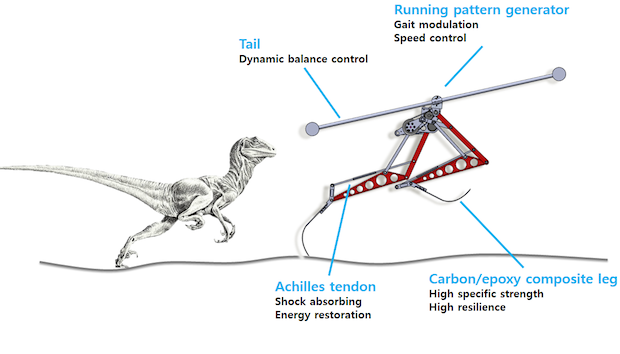
韓國KAIST發展出一種迅猛龍型機器人,最高穩定運作時速可達46km/s。雖然最快速的機器人並不是此種,而是兩年前由Boston Dynamics推出的獵豹機器人。不過仔細比較後可發現,前者是兩足運作,後者是四足運作,而且前者又具有類似尾巴功能的桿件增加在跨越障礙物時的平衡性。以尾巴來增加平衡性並不是新的概念,在MIT發展獵豹機器人時也藉由尾巴來增加穩定性。
運作上值得注意的是,有別於之前推出的機器人由多個馬達來控制,每一隻腳僅僅以一個馬達來控制。腳的結構上採用九連桿機構,其中腳腱扮演在恢復時吸收能量,類似一個彈簧的功能,腳板採用高彈性的材料。中間上端則是速度控制器。整體設計上以輕型材料減少傳統設計上的笨重感,KAIST仍在持續改進修正整體機構,期望有朝一日可以推出能夠不依靠跑步機即可順利運作的雙足跑步機器人。
參考資料:
http://spectrum.ieee.org/automaton/robotics/robotics-hardware/fast-running-biped-robot-based-on-velociraptor