Aug 14
13
跑跑迅猛龍
Leave a comment »
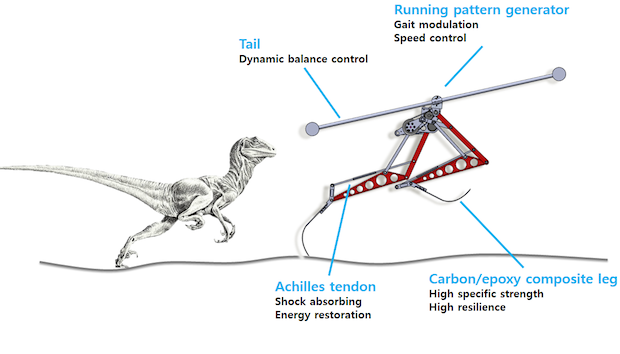
韓國KAIST發展出一種迅猛龍型機器人,最高穩定運作時速可達46km/s。雖然最快速的機器人並不是此種,而是兩年前由Boston Dynamics推出的獵豹機器人。不過仔細比較後可發現,前者是兩足運作,後者是四足運作,而且前者又具有類似尾巴功能的桿件增加在跨越障礙物時的平衡性。以尾巴來增加平衡性並不是新的概念,在MIT發展獵豹機器人時也藉由尾巴來增加穩定性。
運作上值得注意的是,有別於之前推出的機器人由多個馬達來控制,每一隻腳僅僅以一個馬達來控制。腳的結構上採用九連桿機構,其中腳腱扮演在恢復時吸收能量,類似一個彈簧的功能,腳板採用高彈性的材料。中間上端則是速度控制器。整體設計上以輕型材料減少傳統設計上的笨重感,KAIST仍在持續改進修正整體機構,期望有朝一日可以推出能夠不依靠跑步機即可順利運作的雙足跑步機器人。
參考資料:
http://spectrum.ieee.org/automaton/robotics/robotics-hardware/fast-running-biped-robot-based-on-velociraptor