http://www.youtube.com/watch?v=G1t4M2XnIhI 美國哈佛大學團隊研發出可以自行溝通的組合型變形金剛「kilobots」,機器人約高五公分、直徑三公分,用三個金屬小腳移動,以紅外線互相溝通,讓每個機器人知道團體的邊界、追蹤其離起始點的距離,及如何感觸相對位置。集體運作的機器人能較好地處理未知環境,比如可變成蛇的形狀通過沙丘,或是變成球滾下丘陵。組合型機器人非常有利於在未知環境進行工作,如深海探險、火星任務、油污外洩清潔任務與軍事偵察等。 參考資料: 1. http://spectrum.ieee.org/automaton/robotics/robotics-hardware/a-thousand-kilobots-self-assemble 2. https://tw.news.yahoo.com/1024%E5%80%8B%E5%B0%8F%E6%A9%9F%E5%99%A8%E4%BA%BA%E9%9B%86%E9%AB%94%E9%81%8B%E4%BD%9C-%E6%96%B0%E8%AE%8A%E5%BD%A2%E9%87%91%E5%89%9B-%E5%8F%AF%E8%87%AA%E8%A1%8C%E6%BA%9D%E9%80%9A%E5%90%88%E9%AB%94-221040682.html
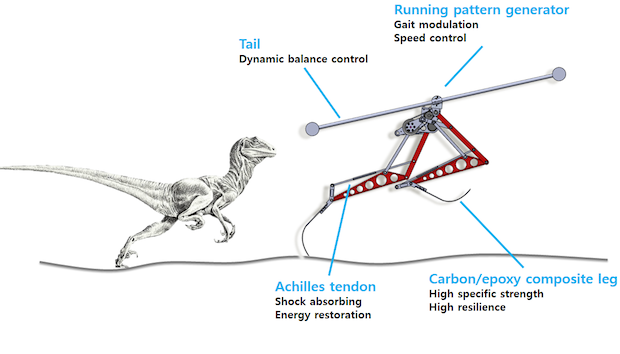
http://www.youtube.com/watch?v=lPEg83vF_Tw 韓國KAIST發展出一種迅猛龍型機器人,最高穩定運作時速可達46km/s。雖然最快速的機器人並不是此種,而是兩年前由Boston Dynamics推出的獵豹機器人。不過仔細比較後可發現,前者是兩足運作,後者是四足運作,而且前者又具有類似尾巴功能的桿件增加在跨越障礙物時的平衡性。以尾巴來增加平衡性並不是新的概念,在MIT發展獵豹機器人時也藉由尾巴來增加穩定性。 運作上值得注意的是,有別於之前推出的機器人由多個馬達來控制,每一隻腳僅僅以一個馬達來控制。腳的結構上採用九連桿機構,其中腳腱扮演在恢復時吸收能量,類似一個彈簧的功能,腳板採用高彈性的材料。中間上端則是速度控制器。整體設計上以輕型材料減少傳統設計上的笨重感,KAIST仍在持續改進修正整體機構,期望有朝一日可以推出能夠不依靠跑步機即可順利運作的雙足跑步機器人。 參考資料: http://spectrum.ieee.org/automaton/robotics/robotics-hardware/fast-running-biped-robot-based-on-velociraptor
http://www.youtube.com/watch?v=0LrZfVvmvRU 日前美國 MIT 公佈了他們跟來自阿拉伯的科學家,一同發明了一款可以主動移動液體和微粒的表面,有潛力改善物品的自我清潔功能。負責這個計劃的 MIT 機械工程副教授 Kripa Varanasi 表示「大部份表面都是被動」、「它們依賴地心吸力或是其他力,去令到液體或微粒移動」,所以他們決定用外部的「場」去令到表面變得主動,而磁力就是這個發明的其中一位主角了。 這個「主動表面」採用是微織結構製成,並滲入了一種「可被操縱的液體」,它可以是被注入微小磁粒的油,或是鐵磁流體。當有水點或是微粒掉到這個表面上,就會被上述液體包裹著,並形成「磁力斗篷」,只要利用磁場就可以控制它們的向去了。Varanasi 指出這個技術適用於太陽能板或熱能集中系統中的鏡子,因為在它們表面積累的濕氣和塵粒都會將它們的功率大大減低,用上這個技術就可以回復本有的功率了。 參考資料:http://chinese.engadget.com/2014/08/03/mit-active-surface/ http://newsoffice.mit.edu/2014/surfaces-can-control-how-fluids-particles-move-0801
http://www.youtube.com/watch?v=uI8jgRtimXQ 由Veebot公司推出的抽血機器人結合機器人與影像判別,可以自動化將使用者的血液抽出,過程不用一分鐘,醫療人員僅需注意更換血袋以及操作是否異常即可。 運作方式: 首先使用者先將手臂放入抽血平台,接著藉由充氣限制血液流通,可以使血管明顯浮出,以紅外線相機結合影像判別血管構造是否為靜脈,並由超音波分析欲抽血的靜脈是否有足夠的血量以及大小可以進行抽血,最後針頭移動並且維持抽血再抽離,即完成整個抽血步驟。 參考資料: http://spectrum.ieee.org/robotics/medical-robots/profile-veebot
http://www.youtube.com/watch?v=skCzl7FlM34 伊利諾大學厄巴納 – 香檳分校的研究員最近研製出一款尺寸不到 1cm 的小小生物機械人。是利用3D打印出來的水凝膠以及骨骼肌所構成。利用外部的電脈衝使肌肉收縮,驅使機器人行走。 現在雖然還是處於前期研究的階段,但是研究員認為這款機械人的出現具有標誌性的意義,因為未來有機會出可以製造一些可以被訓練或是被編程序的生物機械人,可應用於藥物運輸以及手術機器人上。 參考資料: http://spectrum.ieee.org/automaton/robotics/medical-robots/tiny-walking-robots-powered-by-muscle-cells http://chinese.engadget.com/page/2/chinese.engadget.com/2014/07/06/muscle-driven-biobots/
http://www.youtube.com/watch?v=hGu9h0gy76c http://www.youtube.com/watch?v=M413lLWvrbI 這個機械手臂是由瑞士洛桑聯邦理工學院所研發出來的。此機械手臂可藉由人為的引導來學習如何去抓取一個飛行的物體,在多次的學習後,機械手便可鑑別出該飛行物體的運動軌跡模型,他們稱此為”pregramming by demonstration” 其運作了主要過程是由數個相機來捕捉該物體的位置,再藉由學習的經驗來及時的產生出一個數學模型並以5ms的頻率進行美的位置一移動與預測,藉此即可捉住飛行的物體。 參考資料: http://www.popsci.com/article/science/robotic-arm-catches-whatever-you-throw-it?dom=PSC&loc=recent&lnk=7&con=IMG

http://www.youtube.com/watch?v=0XDpT8hI89k 由 Swiss NCCR in Robotics 所資助瑞士的洛桑聯邦理工學院研發出的Roombots,可以用來移動家具,自組裝以及自我重新配置。 單元間的連接器可以依照不同的問題而改變連接器的結構。 這種機器人可以用在:老人、或有運動障礙者的家庭中,裝置藝術、衛星或太空站上面。 參考連結: http://biorob.epfl.ch/cms/page-36376.html
http://www.youtube.com/watch?v=rMMlmqohOJs 美國將於亞利桑那州興建一座熱對流發電塔,這些高塔利用沉降氣流發電。在乾燥炎熱的氣候環境下,高塔透過沉降氣流進行發電。在中空的巨大高塔內對高處的空氣灑水,會增加高處空氣的濕度與重量,較重的空氣開始沉降並逐漸加速,到達底部時風速可達每小時80公里,相當於九級風。高塔底端設有52座隧道,隧道內設置風力發電機組,當空氣快速由隧道中離開高塔時便會推動葉片,產生可觀電力。 根據最新的設計規範,專為附近聖路易斯,美國亞利桑那州的發電塔塔,總生產能力達到1,250兆瓦/小時。由於在冬日裡低容量,每天平均每小時產量全年平均約435兆瓦/小時。 參考資料 http://scitechvista.most.gov.tw/zh-tw/Feature/C/0/1/10/1/1495.htm http://www.solarwindenergytower.com/the-tower.html
http://www.youtube.com/watch?v=6dv2sLNikI4 現時行動打印機要麼就是行動性不足,要麼就是有足夠的行動性,但是印出的尺寸很小或不能打印在傳統紙張上。Zuta Labs 針對了這些缺點而研發出 Pocket Printer「機械人」,它只有成人手掌般的大小,所大家也預期到它有別於一般的打印機,不用送紙的結構;要打印的話,它會直接靠著輪子在平放的紙張上走動和打印。所以,大家就算在咖啡室中談生意,也可以即時打印出文件和合約等。如果你有興趣支持這個生產計劃的話,只要付出 US$180(約 HK$1,400 / NT$5,430)這個 Kickstarter 價就會有一部,其正式推出時的價格則為 US$200(約 HK$1,550 / NT$6,070)。

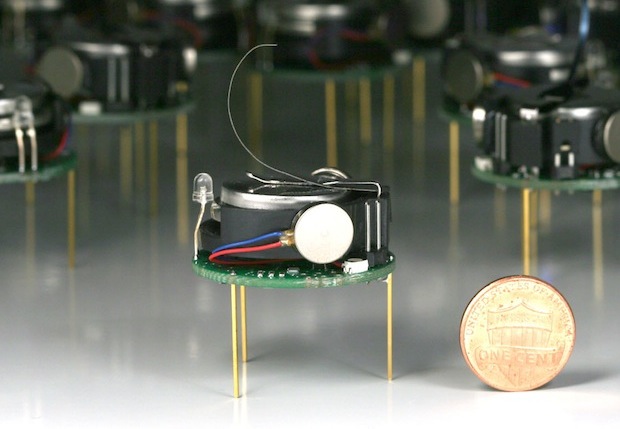
http://www.youtube.com/watch?v=uL6e3co4Qqc 研究機構 SRI 打造了一隻微型機器人「施工隊」,其最特別的地方,就是在使用磁力的前提下依然能實現個體的精準操控。磁力是驅動微型機器人的好方法,因為這樣一來就不用為機器人專門準備電源,那它們的體積就能做得比較小。但問題是,在磁場內機器人往往都會統一行動,若是如此其應用的範圍就很有限了。而 SRI 想到的辦法就是用印製電路板來實現磁力局部控制,從而達到在極小空間內向各個機器人指派不同任務的目的(比如說在實驗室裡「建造」小型的建築物)。這樣的技術如果能夠好好利用的話,未來我們就有望看到由小機器人所組成的「微型工廠」,讓它們來製造電子產品,或像是修復精密儀器或檢查故障,人工巢狀結構或電路,以及打造微小物品。 參考資料 1.http://chinese.engadget.com/2014/04/18/SRI-microbots/ 2.http://spectrum.ieee.org/automaton/robotics/industrial-robots/watch-sris-nimble-microrobots-cooperate-to-build-structures 3.http://www.ettoday.net/news/20140425/350174.htm#ixzz30Lxcm5s5 4.http://nanolab.me.cmu.edu/projects/MagneticMicroRobot/