Laser Deposition Welding and Milling
傳統Laser Deposition 製程出的產品,表面都很粗糙,還需要再經過研磨加工才能達到要求的品質。LASERTEC 65 3D這台新型的加工機將雷射沉積製程和研磨加工結合,當雷射加工結束後,雷射加工頭可以換成?刀進行研磨,且這是一台5軸加工機,可以滿足大部分需求。 資料來源: http://en.dmgmori.com/products/lasert…
傳統Laser Deposition 製程出的產品,表面都很粗糙,還需要再經過研磨加工才能達到要求的品質。LASERTEC 65 3D這台新型的加工機將雷射沉積製程和研磨加工結合,當雷射加工結束後,雷射加工頭可以換成?刀進行研磨,且這是一台5軸加工機,可以滿足大部分需求。 資料來源: http://en.dmgmori.com/products/lasert…
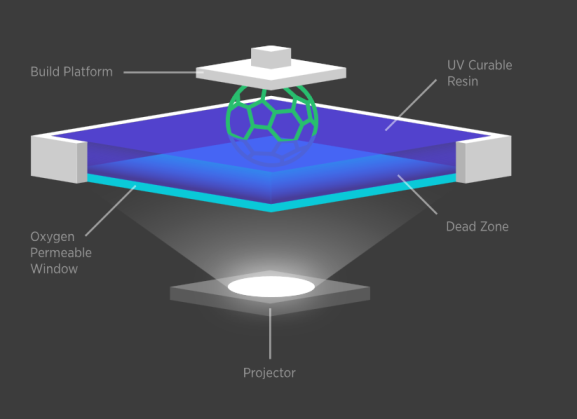
加州Redwood City的Carbon3D公司聯手北卡Chapel Hill大學共同研發了新型液體3D打印機,大幅削減了打印時間。 在一個裝滿液態樹脂的小盆裡,盆底有個小孔,充溢著幾十微米厚的富氧液體,就像一個透明窗戶,紫外線可以從這個孔照上來。小孔處,不會發生凝固,稱為“死區”。 打印時,將一塊金屬片置於樹脂池的表面,然後用紫外線對其燒製。紫外線將“死區”之上特定區域的樹脂硬化,硬化後的樹脂附著於金屬片。當凝固至足夠的量,3D打印機慢慢向上提出金屬片。當硬化的樹脂從樹脂池裡拖出的時候,新的液體樹脂會被注入樹脂池。 採用這種新方法,打印速度高達每小時1米多,可以製造出複雜結構的物體,比如10公分高的艾菲爾鐵塔。通過放慢打印速度,還可以打印出小於100微米寬的物件,比頭髮絲還細。
機器人蠑螈多達64個點對動物的骨骼,我們都能夠記錄骨骼三維運動很詳細,雖然可能不是最快的步行者,但其低重心使得它非常穩定,而且也多:它可以在陸地上行走,在水中游泳,並無縫地過渡兩者之間。這使得它非常適用於強制性搜索和救援的應用 資料來源:http://spectrum.ieee.org/automaton/robotics/robotics-hardware/epfl-pleurobot-robotic-salamander
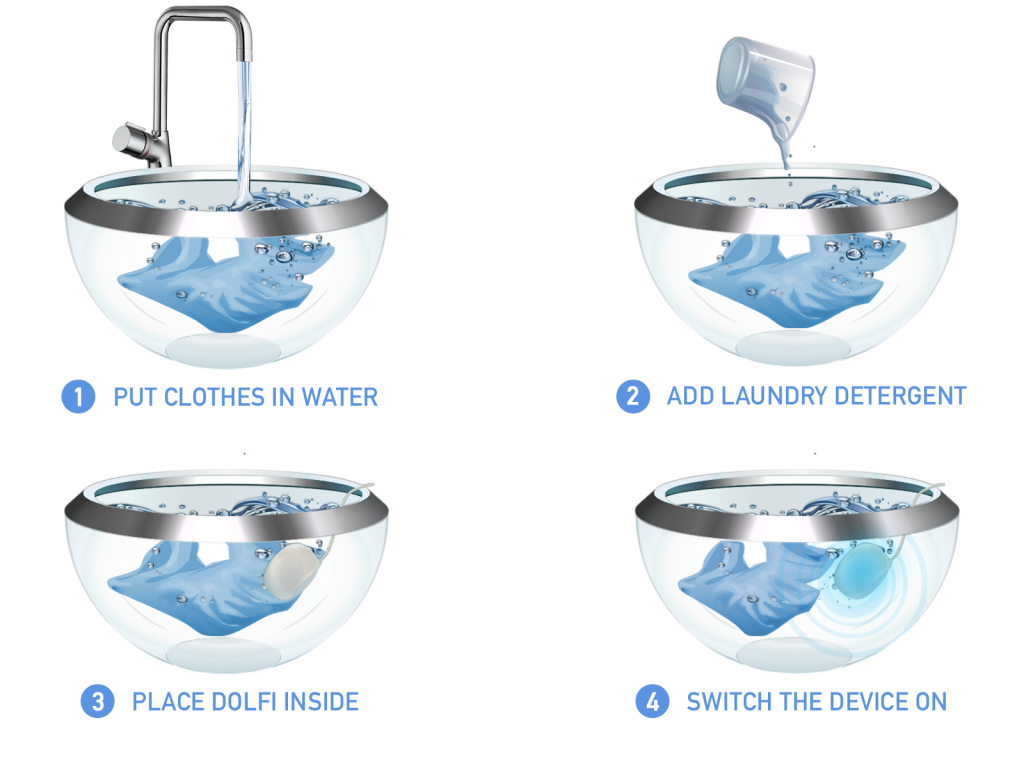
瑞士的MPI Ultrasonics公司將超音波清洗運用在Dolfi洗衣上, 由於是透過頻聲波製造出數以萬計的細小水流,特別適用於柔軟易損毀的布料, 一台Dolfi所需要的能源是一台標準型洗衣機的八十分之一,符合節能的概念。 文章出處:http://router-u.com/archives/3080
這是由Flexbot團隊所推出名為FlexPV的新產品。 基本上他是由一個150W的電動馬達所組成,裡面包含獨立的電源,陀螺儀與WIFI模組。 該裝置可以簡單的裝設在腳踏車,直排輪,或滑板上,理論上可以行走15公里。
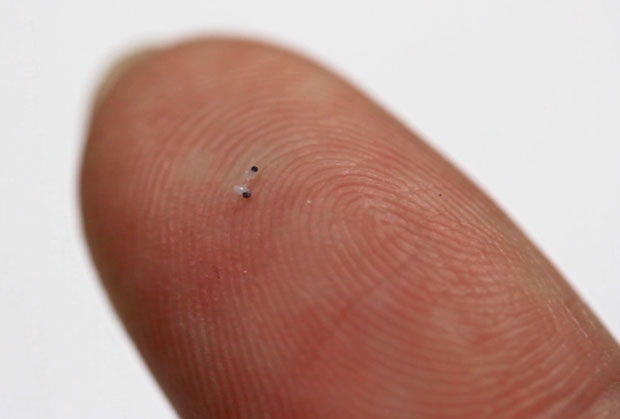
此機器人以扇貝運動方式為設計概念,目的在於人類體內的流動,因此在設計上以微米奈米等級的尺寸。以目前的技術可以製作到毫米尺寸,由於要微小化,普遍的機器人設計方式在縮小尺寸會很有困難,因此此機器人動力來源不再於電池,而在於外在磁場,移動的驅動器將以易微小化的壓電與記憶合金取代。 開發機器人最大的難處在於應用層面,扇貝機器人將於液體中游動,但是流體中的黏滯性會是很大的問題,且於人體中不同的液體增加其複雜性。扇貝機器人運動的方式有別於傳統的機器人以鞭毛與纖毛的方式移動,取而代之以一前一後,前進之後便後退一些以移動。此機器人最大的訴求在於可以游動於人體間並且治療。 參考資料: http://spectrum.ieee.org/automaton/robotics/medical-robots/robotic-microscallops-can-swim-through-your-eyeballs
劍橋大學的油電混合機在 2014 年 12 月 23 日試飛成功,劍橋大學的油電混合機結合四個活塞推進的引擎與電動馬達,當飛機攀升到穩定飛行的高度時,電動馬達可以輔助引擎,減少燃料消耗,或是切換成發電機替電池充電,油電混合機比起傳統燃油引擎的飛機,能節省 30% 的燃料。但如果把油電混合機視為救星可能言之過早,以目前的技術而言,飛行時間大約只有 10 分鐘。由於劍橋大學油電混合機不像傳統燃油客機能長途飛行、載運大量乘客,加上都會區長期難以解決交通壅塞問題,通勤族尋求更便捷的交通工具,因此小型個人機有潛在的市場,這也是商用油電混合機未來可能發展的方向;至於油電混合應用於大型客機需要更多研究人員的時間與心血投入,羅馬不是一天造成的,所以期望更環保的大型客機,可能還得有點耐心。 參考資料: 1. http://technews.tw/2015/01/11/hybrid-airplane-university-of-cambridge/

Emotia公司所推出的電動皮帶,可結合藍芽傳輸配對手機,在給定腰圍之後,會在使用者坐下的時候調整腰圍,站起來的時候恢復原本的腰圍。除此之外,還有時間定時的功能,提醒使用者是時候站起來休息。 這只是個概念產品,預計2015年會有一個初步的產品上市。
這隻名為 HECTOR 的機械竹節蟲之概念,已在幾年前萌生了,直到現在我們終於看到它踏出第一步了。這隻機械蟲是由德國比勒費爾德大學(Bielefeld University)所發明,它跟普通的機械蟲相比有一個過人之處,就是懂得在腳撞到障礙物之時,自動「縮腳」和重新踏出正確的一步,只因每隻腳都可以獨立地就地形做出適當的步姿。在示範的片段中,我們見到它可以應付凹凸不平的碎石路和梯級,過程不需要任何模式的切換。 另外,大學方面表示他們已經製造出一個配備雙鏡頭和雙觸角的原型機,用作感應遠距離的事物。目前他們最大的挑戰就是,要有效地將它們跟本身已有的姿勢及關節控制感應器整合,預計要在 2017 年才會跟大家見面。它的步行片段可以在繼續閱讀中找到。

由Thalmic Lab.所開發的Myo手環藉由偵測肌肉動作來控制裝置,有別於傳統手勢控制的原理:藉由鏡頭捕捉人類動作,此種設計可以揮別於小範圍內的操作。 手環搭載 ARM 處理器、六軸感應器、鋰電池,由手部肌肉運動產生訊號並且經過藍芽4.0傳輸控制命令。此種裝置最大的問題在於靈敏度以及反應時間,不過由影片中得知此類問題並沒有產生過大的影響,且可以應用於簡報、玩遊戲、瀏覽網頁、遠端控制機器人,目前這種手環支援Windows、MAC OS、Android,要價199美元。 參考資料: http://buzzorange.com/techorange/2013/03/01/myo/ http://www.thalmic.com/en/myo/