Feb 15
4
Micro-Scallop
Leave a comment »
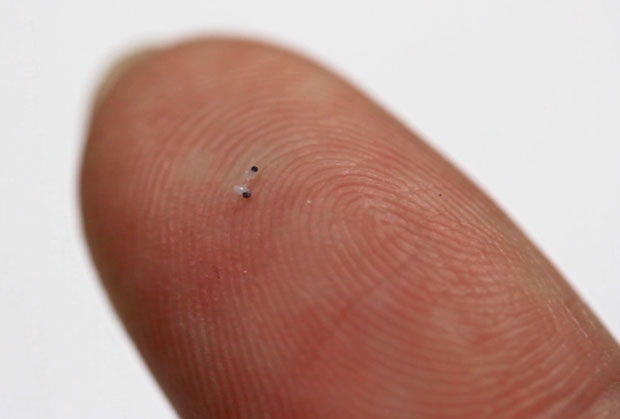
此機器人以扇貝運動方式為設計概念,目的在於人類體內的流動,因此在設計上以微米奈米等級的尺寸。以目前的技術可以製作到毫米尺寸,由於要微小化,普遍的機器人設計方式在縮小尺寸會很有困難,因此此機器人動力來源不再於電池,而在於外在磁場,移動的驅動器將以易微小化的壓電與記憶合金取代。
開發機器人最大的難處在於應用層面,扇貝機器人將於液體中游動,但是流體中的黏滯性會是很大的問題,且於人體中不同的液體增加其複雜性。扇貝機器人運動的方式有別於傳統的機器人以鞭毛與纖毛的方式移動,取而代之以一前一後,前進之後便後退一些以移動。此機器人最大的訴求在於可以游動於人體間並且治療。
參考資料:
http://spectrum.ieee.org/automaton/robotics/medical-robots/robotic-microscallops-can-swim-through-your-eyeballs